V dnešnej dobe už asi každý človek berie ako samozrejmosť to, že si môže robiť čo chce. Vo veľa prípadoch sú včelie úle umiestnené mimo obývané oblasti a to hlavne z dôvodu strachu pred uštipnutím. Preto je cieľom tohto článku popísať ako je možné ochrániť tieto úle aj na miestach, kde nie je zavedená elektrická energia a aby si aj včelár, ktorý je laik do elektrotechniky vedel upraviť prípadne rozšíriť bezpešnostný model podľa svojích potrieb.
Typy rozloženia včelích úľov
Nie každý včelár používa rovnaké rozloženie a uloženie včelích úľov a preto sa budem venovať aspoň tým najčastejšie používaným. Rozoženie záleží hlavne od priestoru, na ktorý chce včelár umiestniť úle. Z najčastejšie používaných rozložení som vybral tri, ktoré sa u nás využívajú asi najviac a to:
- Uloženie úľov v domci alebo včelnici
- Rozloženie úľov v radoch
- Rozdelenie úľov do písmena L
Samozrejme existuje ešte veľa ďalších rozložení ale tým sa v tomto článku nebudem venovať.
Bezpečnostný model
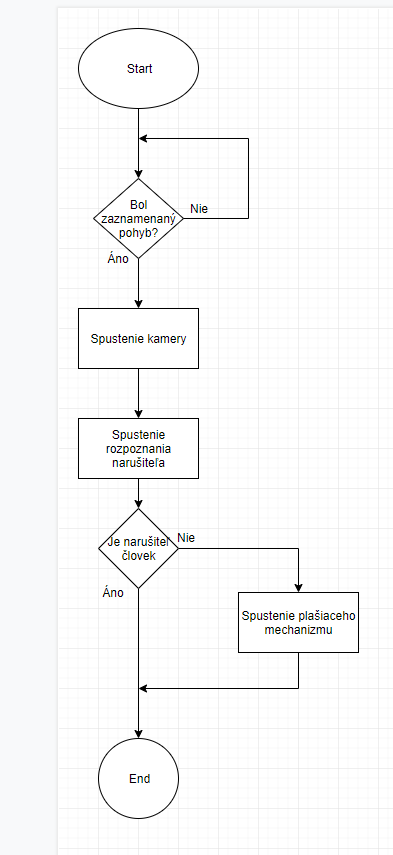
Pri navrhovaní modelu si je potrebné uvedomiť, že narušiteľ nemusí byť len človek ale aj zviera, ktoré dokáže v nemálo prípadoch napáchať obrovské škody. Preto je potrebné rozlíšiť o akého narušiteľa sa jedná a určiť správnu metódu na odohnanie zvieraťa aby neboli včely obmedzované. Preto na plašenie zvery som namuesto zvukového efektu použil svetelný, ktorý včely nijak neobmedzuje ale pri jeho spustení sa za zvieraťom vytvorí a zanikne tieň, ktorý by mal zviera vyplašiť.
Pri návrhu modelu som použil tri PIR senzory, ktoré sú umiestnené vo výške 40, 120 a 180 cm nad zemou. Pri narušení oblasti sa potom zisťuje, ktorý PIR senzor zaznamenal pohyb a spustí sa séria podmienok, ktoré vyhdnocujú, či je narušiteľ človek alebo zviera.
Ak súčasne zaznamenajú pohyb všetky tri senzory nad sebou, tak sa najskôr jedná o človeka a spustí sa len tajné zaznamenávanie videa bez použitia plašiaceho mechanizmu a to z dôvodu, aby narušiteľ nepoškodil alebo neukradol kameru alebo ostatné komponenty.
Ak pohyb zaznamenajú senzory vo výške 40 cm alebo 120 cm ale senzor vo výške 170 cm nezaznamená žiaden pohyb tak je vysoká pravdepodobnosť, že narušiteľ je zviera a spustí sa nahrávanie videa aj s plašiacim mechanizmom.
Použité komponenty
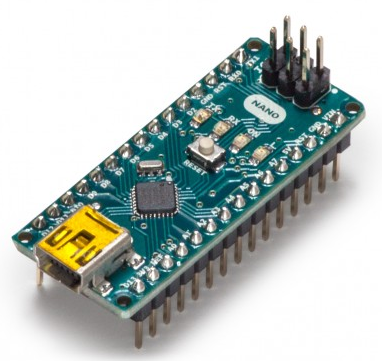
Nano V3.0 MINI USB ATmega328P CH340G 5V 16M Mikro-riadiaca doska Arduino
Arduino Nano je malá, kompletná a priateľská doska na báze ATmega328. Je ho možné napájať cez:
- Mini-B USB pripojenie
- 6-20V neregulovaný externý zdroj napájania (pin 30)
- 5V regulovaný externý zdroj napájania (pin 27)
Zdroj energie sa automaticky zvolí na zdroj s najvyšším napätím. Má 32 KB pamäť.
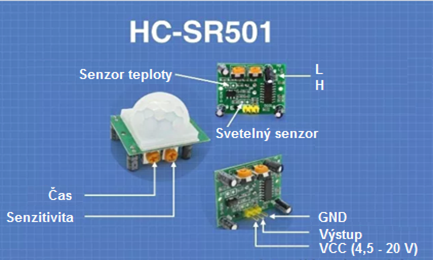
Infračervený snímač pohybu PIR HC-SR501
HC-SR501 je modul snímača pohybu, ktorý je lacný a veľmi univerzálny. Môže byť použitý samostatne, alebo v kombinácií s mikrokontrolerom alebo mikropočítačom na vytvorenie množstva produktov na snímanie pohybu.
Pasívny infračervený detektor pohybu pracuje tak, že sa najskôr prispôsobí „normálnemu“ infračervenému tepelnému podpisu rámci svojej detekčnej oblasti a potom hľadá náhle zmeny tohto infračerveného podpisu. Táto zmena nastane pretože živá bytosť vstúpi alebo sa pohybuje v rámci sledovanej oblasti.
Pripojenia sú nasledovné:
- VCC - kladný jednosmerný napäťový vstup od 4,5 do 20 voltov.
- VÝSTUP - Jedná sa o 3,3 voltový logický výstup. LOW indikuje žiadnu detekciu, HIGH znamená, že niekto bol detekovaný.
- GND - pripojenie uzemnenia
K dispozícií sú tiež dva potenciometre na nastavenie niekoľkých parametrov:
- SENZITIVITA - Nastavuje maximálnu vzdialenosť, ktorú môže detekovať pohyb. Je v rozsahu od 3 metrov do približne 7 metrov. Topológia oblasti môže ovplyvniť skutočný dosah, ktorý sa dá dosiahnúť.
- ČAS - Nastaví, ako dlho bude na výstupe signál HIGH po detekcii. Minimálne je to 3 sekundy, maximálne 300 sekúnd alebo 5 minút
Tento konkrétny model obsahuje aj jumper, ktorý má dve nastavenia:
- H - nastavenie Hold alebo Repeat. V tejto polohe bude HC-SR501 pokračovať vo výstupe signálu HIGH, pokiaľ bude naďalej detekovať pohyb.
- L - nastavenie prerušovaného alebo opakovaného prehrávania. V tejto polohe zostane výstup HIGH po dobu nastavenú nastavením TIME potenciometra.
SQ11 Spy Hidden DV DVR Camera Full HD 1080P Mini Car Dash Cam IR Night Vision
Túto malú ale efektívnu kameru sme vybrali hlavne kvôli pomeru veľkosti ku kvalite obrazu. Jej veľkosť je 25x24x24 mm a dokáže nahrávať s rozlíšením Full HD 1080p. Obsahuje nabíjateľnú batériu s kapacitou 200mAh, čo dovoľuje nahrať až 100 minút záznamu na jedno nabitie pri rozlíšení 1080p / 30fps. Doba nabíjania je približne 2 až 3 hodiny s nabíjacím napätím 5V DC. Širokouhlý fotoaparát dokáže snímať široký záber až 140°. Táto kamera podporuje operačné systémy ako Windows ME / 2000 / XP / 2003 / Vista, Mac OS, Linux. Záznam sa ukladá na micro SD kartu, ktorá je súčasťou balíčka.

LS 240LED SMD2835 2-Line 30W 2860Lm Natural White 24V EPISTAR
Flexibilný LED pás s vysokým svetelným výkonom, LED osadené v dvoch radoch vedľa seba. Pás dosahuje svetelný tok 2860 Lumenov a uhol osvetlenia 120°. Šírka LED pásu je 16mm. Používa LED čipy typu SMD 2835 (tieto čipy majú väčší svetelný output a produkujú menej odpadového tepla). Ako chladič je možné použiť hliníkový profil pre LED pásy alebo hliníkovú pásovinu pre chladenie pre výkon 30W/m. Pás je deliteľný po segmentoch = každých 2,5cm. Spodná strana pásu je podlepená samolepiacou 3 metrovou páskou. Pás je napojiteľný jednosmerným napätím (DC 24V) s požadovaným výkonom (30 Watt na meter pásu) a obsahuje až 240 LED na meter.

Optimálne rozloženie komponentov
Pri rozložení komponentov si je nutné uvedomiť, že nie každý včelár má možnosť umiestniť snímače alebo kameru presne na navrhnuté miesto a to napríklad z dôvodu, že sa na tom mieste nenachádza strom alebo iná entita, na ktorú by bolo možné súčiastky ukotviť. Preto je predpoklad, že si každý používateľ umiestni komponenty podľa toho ako mu to umožňuje terén. V každom rozložení úľov sa počíta s rozmermi úľa s nadstavbou 440x375x630 mm.
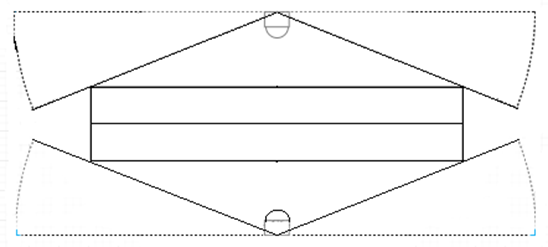
Uloženie úľov v domci alebo včelnici
Pri tomto rozložení úľov predpokladám, že rozmery domca budú 5000x500x1000 mm a domec bude uložený vo výške 500mm nad zemou. Aby kamera a snímače zaberali čo najväčšiu plochu v okolí domca umiestnil som ich prednej a zadnej strany. PIR senzory spolu s kamerou a LED pásmi som umiestnil 2 metre od domca a keďže dosah mnou použitého PIR senzoru je 7m mala by sa zabezpečiť skoro celú plochu v okolí domca.
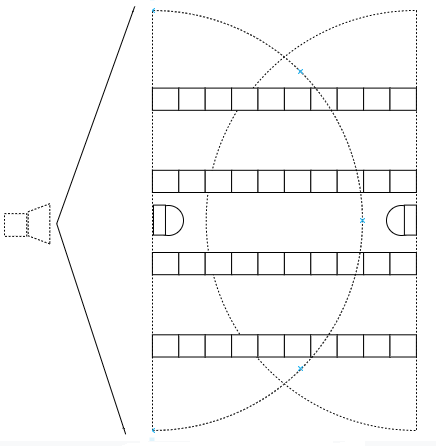
Rozloženie úľov v radoch
Pri tomto rozložení predpokladám, že v jednom rade bude 10 úľov. Voľná medzera medzi jednotlivými radmi bude široká 1 meter a počet radov bude 4. Úle budú uložene 50cm nad zemou. Aby snímače pokryli celú sledovanú oblasť umiestnil som ich do stredu medzi rady z pravej a ľavej strany. Keďže mnou použitá kamera dokáže nahrávať HD videa nie je potrebné umiestňovať ju z oboch strán. Svietivé LED pásy som umiestnil na vrchný rad z oboch strán úľov a na ostatné rady prednej strany.
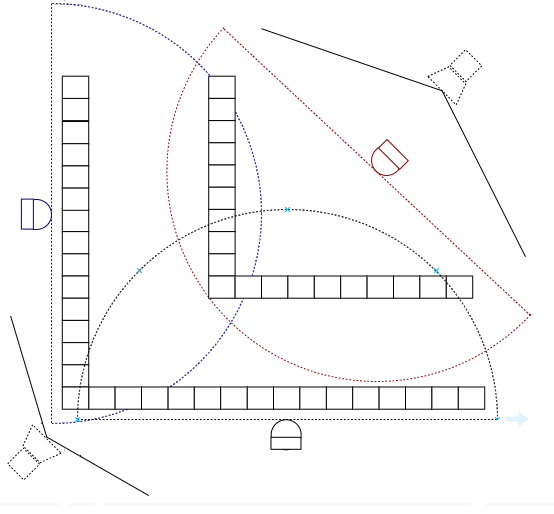
Rozdelenie úľov do písmena L
Pri tomto rozložení predpokladám, že úle budú uložené v dvoch radoch do písmena L. Prvé písmeno bude obsahovať 10x10 úľov a druhé 15x16 úľov. Vzdialenosť medzi písmenami bude približne 2 metre a úle budú uložené 50cm nad zemou. Keďže pri tomto rozložení sa zaberie pomerne veľká plocha rozhodol som sa použiť tri sady snímačov, ktoré som umiestnil do trojuholníka. Takto je snímaná celá plocha úľov a aj priestor medzi nimi. Kamery som umiestnil do pravého horného a ľavého dolného rohu snímanej plochy. Na úle, ktoré sú umiestnené v zadnom (väčšom) rade som umiestnil LED pásy z prednej aj zadnej strany a na úle, ktoré sú v menšom rade som ich umiestnil z prednej strany.
Zhrnutie
Cieľom tejto práce bolo navrhnúť model na rozoznávanie narušiteľov z okolia úľov, ktorý nebude mať vysoké nároky na spotrebu energie, bude použiteľný aj v oblasti kde nie je prístup k elektrickej energií a nebude vyžadovať vysoké finančné investície. Snažil som sa nájsť najoptimálnejšie riešenie, ktoré by dokázal skonštruovať aj laik v práci s arduinom a jeho komponentami ale zároveň aby toto riešenie bolo efektívne a spĺňalo svoj hlavný účel a to detekciu a rozpoznávanie narušiteľov a následne vykonalo príslušné akcie bez toho, aby tieto akcie nejako rušili alebo obmedzovali včely pri ich každodennej práci. Vypočítal som, že cena použitých komponentov by sa mala pohybovať okolo 50 eur. Táto cena ale nie je pevne stanovená, záleží od rozmerov sledovaného objektu. Ak by ale používateľ chcel vyspelejšie riešenie tak existuje veľká škála komponentov, pomocou ktorých je možné viac rozšíriť tento detekčný systém ako napríklad automatické odosielanie SMS pri zachytení pohybu alebo len pri rozpoznaní človeka. Tieto rozšírenia však so sebou prinášajú ďalšie úskalia, ktoré by musel používateľ vyriešiť a to napríklad pri tomto konkrétnom rozšírení by sa musel zabezpečiť nepretržitý mobilný signál aj v miestach, ktoré sú vzdialené od miest a obcí.