Práca je zameraná na vývoj nového varovného systému pred vlnami cunami. Ide o vývoj metódy na hľadanie vĺn v airglow žiarení vyvolaných vlnami cunami.
Úvod
Projekt Mini-EUSO je prekurzorom experimentu JEM-EUSO, prostredníctvom ktorého sa overí funkčnosť komponentov EUSO experimentov a fyzikálne podmienky pre ich merania. Primárne je JEM-EUSO projekt zameraný na hľadanie spŕšok častíc, vyvolaných nárazom vysokoenergetickej častice do molekúl atmosféry Zeme. Cieľom práce je preskúmať možnosť využitia Mini-EUSO detektoru alebo podobného experimentu, na rozpoznanie cunami vĺn z obežnej dráhy Zeme, prostredníctvom snímania žiarenia hornej vrstvy atmosféry, takzvaného airglow. Vlny pozorovateľné z orbity Zeme v airglow žiarení sú špeciálnym prípadom atmosférických gravitačných vĺn. Keďže experiment Mini-EUSO štartuje až koncom roku 2017, implementovali sme simulácie výstupov UV kamery použitej v tomto experimente a následnú detekciu prítomnosti vĺn v týchto simulovaných dátach. Detegované vlny sú rekonštruované s cieľom určiť ich základné parametre. Následne je spoľahlivosť rekonštrukcie vyhodnotená dvomi štatistickými metódami.
Metóda
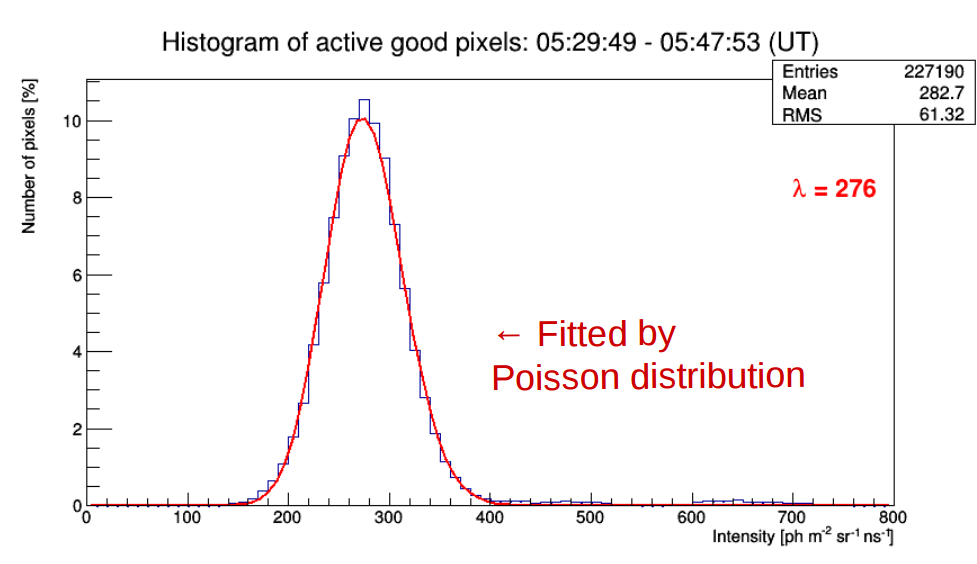
V súčasnosti nemáme k dispozícii reálne dáta. Preto je potrebné modelovať výstupné dáta UV kamery experimentu. Vedci v roku 2014 uskutočnili misiu EUSO-balloon, v rámci ktorej bol vypustený balón s rovnakým Photo Detector Mmodule (PMD), aký bude použitý v rámci misie Mini-EUSO. EUSO-balloon absolvoval počas bezmesačnej noci z 24. na 25. augusta 8-hodinový let v regióne blízko mestečka Timmins v Kanade. Balón uskutočnil merania z výšky 38 km. Pre analýzu dát UV pozadia boli použiteľné 3 hodiny meraní, počas ktorých pozorovala kamera oblasť s plochou 780km2. Pri analýze reálnych výstupných dát z misie EUSO-balloon sa potvrdilo, že pri pohľade na zemským povrchom odrazené airglow žiarenie za bezoblačnej noci vhodnej na snímanie, výstupy kamery, teda dáta, ktoré kamera nazbierala a uložila na disk, zodpovedajú svojim rozdelením takzvanému Poissonovmu rozdeleniu pravdepodobnosti. Viď obrázok 1, na ktorom je okrem rozdelenia pravdepodobnosti vidno, že intenzita svetla, ktoré EUSO-balloon pozoroval bola v priemere 276 ph.m-2.ns-1.sr-1. Toto číslo samozrejme prislúcha danému času merania a danej pozícii. Vo všeobecnosti bude hodnota pozorovanej intenzity na rôznych geografických polohách v rôznych časoch rozdielna.
Výstupy kamery reprezentujeme pomocou matíc. Ide o matice s rozmerom 48x48 pixelov, ktoré obsahujú simuláciu šumu snímaného z vesmíru pri pohľade na atmosféru Zeme bez mrakov. Pre vyhľadanie vĺn v snímkach sme sa rozhodli využiť zhlukovaciu metódu. Táto metóda môže byť implementovaná rôzne, no vo všeobecnosti pracuje na princípe spájania bodov v snímke podľa toho, či spĺňajú podmienky príslušnosti do zhluku.
Prvou podmienkou, ktorú sme zaviedli, bola intenzita vybudenia analyzovaného bodu. Úroveň požadovanej intenzity sme schopní meniť, a tým meníme aj citlivosť zhlukovacej metódy. Požadovanú intenzitu vybudenia zadávame ako percento zo strednej hodnoty vybudenia snímky a bod spĺňa podmienku vybudenia len ak jeho vybudenie dosahuje väčšiu alebo rovnakú hodnotu ako je referenčná hodnota.
Za ďalšiu podmienku sme určili polohu aktuálne analyzovaného bodu. Tento musí susediť s už nájdeným zhlukom, pričom počiatočný zhluk je tvorený jedným pixelom. Keďže hľadáme chrbát vlny, za štartovací pixel považujeme najjasnejší pixel z obrázka. Tento pixel je na začiatku pridaný do výsledného zhluku, a preto aj v prípade, že žiaden pixel nesplní podmienky príslušnosti do zhluku bude veľkosť výsledného zhluku rovná 1. Hľadanie zhluku v snímke prebieha po kvadrantoch v smere od štartovacieho pixelu najprv po riadkoch, a následne po stĺpcoch v aktuálnom kvadrante. Po prehľadaní všetkých kvadrantov dostávame výsledný zhluk, ktorý považujeme za vlnu a ďalej ho analyzujeme.
Pre vyhodnotenie správnosti a presnosti fungovania zhlukovacej metódy sme analyzovali matice, do ktorých sme najprv sami vložili vlnu. Následne sme pozorovali veľkosť nájdeného zhluku, pričom sme predpokladali, že so zvyšujúcou sa amplitúdou vlny sa bude zväčšovať aj nájdený zhluk. Taktiež sme predpokladali, že nastavenie požadovanej intenzity (thresholdu) bude mať vplyv na veľkosť nájdeného zhluku a ich vzťah bude nepriamo úmerný - čím bude vyžadovaná väčšia intenzita pre splnenie podmienky príslušnosti do zhluku, tým menej pixelov bude túto podmienku spĺňať. Ďalším krokom pri hľadaní vlny je rekonštrukcia vlny z nájdeného zhluku. Túto rekonštrukciu vykonávame s využitím metódy najmenších štvorcov, prostredníctvom ktorej vyrátame parametre aproximovanej priamky pre nájdený zhluk. Výsledky ďalej využívame na určenie sklonu nájdenej priamky, teda sklonu samotnej vlny v analyzovanej snímke. Neskôr bude možné pomocou informácie o aktuálnej polohe ISS a natočenia kamery určiť aj reálny smer vlny v oceáne.
Spomenuté simulácie mali za úlohu overiť funkčnosť a spoľahlivosť implementovaných metód, avšak neposkytovali informáciu o tom, či je satelit, umiestnený na obežnej dráhe Zeme, schopný nájsť atmosférickú gravitačnú vlnu vyvolanú vlnou cunami. Preto bola potrebná ďalšia simulácia, ktorá spočívala v spojení dráhy ISS a simulácii šírenia atmosférickej gravitačnej vlny nad oceánom. Snímacia frekvencia bola nastavená na 10 sekúnd a získané snímky sme analyzovali vyvinutým postupom.
Výsledky
Na obrázku 2 vidíme výsledky analýzy veľkosti zhluku, ktoré potvrdzujú naše predpoklady spísané v predchádzajúcej kapitole.
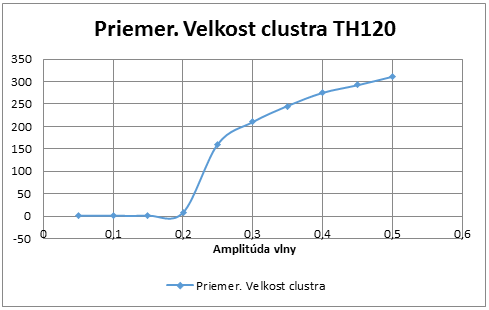
N reprezentuje počet analyzovaných snímkov pre jeden bod grafu. Výsledný počet predstavuje priemerný počet bodov v zhluku pre danú amplitúdu. Keďže sa potvrdili naše predpoklady, mohli sme pristúpiť k analýze presnosti hľadania vlny. Na základe spracovania 1000 snímkov pre jeden konkrétny uhol smerovania vlny a konkrétny threshold, sme vytvorili tabuľku 1 zobrazujúcu výsledky takejto analýzy.
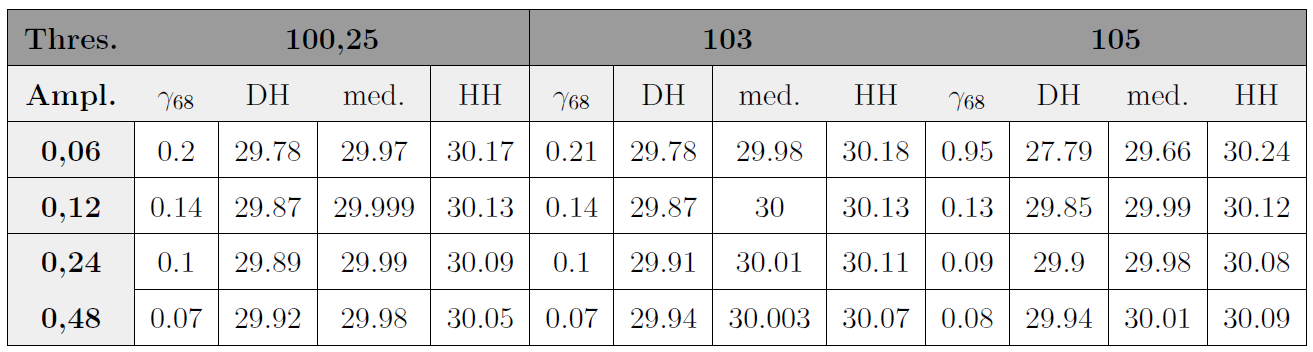
Tabuľka 1 obsahuje informácie o uhle nájdeného zhluku a štatistické ukazovatele, pričom pre vznik tejto tabuľky bolo analyzovaných 12 000 snímok. Tento počet vyplýva z počtu kombinácií rôznych amplitúd a aplikovaných thresholdov. Pri analýze rôznych uhlov sme zistili, že metóda je najpresnejšia pri uhle 0° a so zväčšujúcim sa uhlom sa zväčšuje aj odchýlka merania. To je spôsobené metódou najmenších štvorcov, ktorá vložené body aproximuje horizontálnou priamkou. Preto pri analyzovaní vĺn s uhlom 90° dosahujeme výsledky merania rovné 0°. Zo simulácie letu ISS sme vytvorili tabuľku 2 v ktorej vidíme, že ukazovateľ gamma 68 dosahuje hodnotu 6,68.
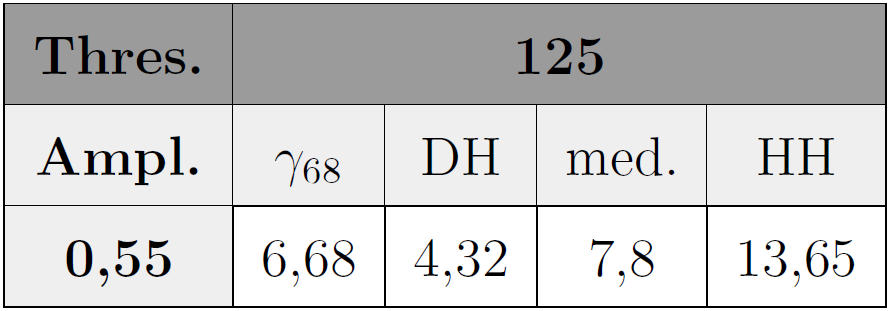
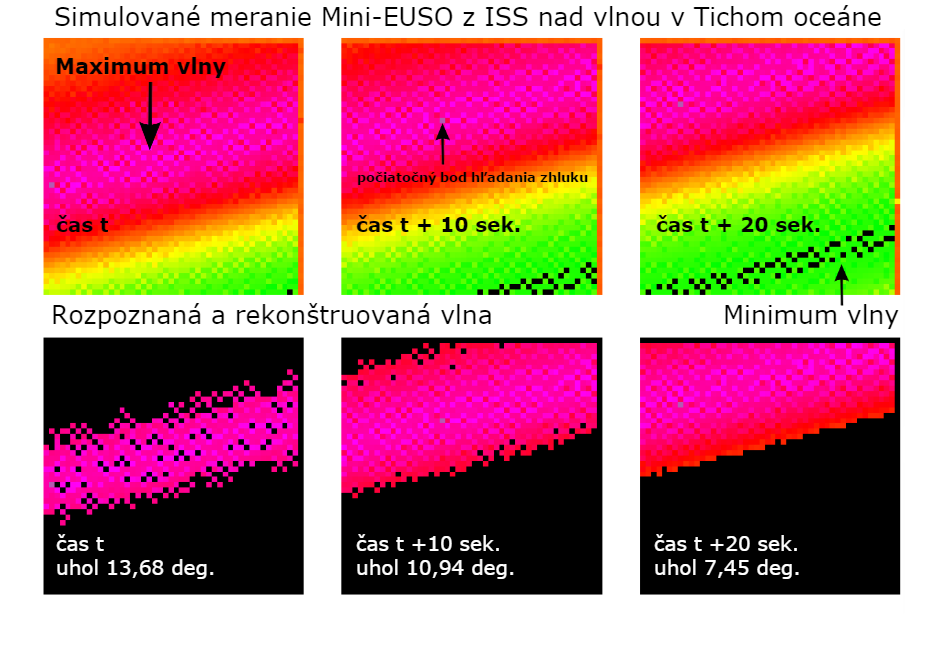
To znamená, že 68% analyzovaných snímok má odchýlku nájdeného uhla menšiu ako je 6,68°. Na obrázku 3 vidíme sumár simulácie, kde sú vyznačené významné elementy, ako je maximum vlny, minimum vlny a najjasnejší pixel, ktorý bol využitý ako počiatočný bod hľadania zhluku.
Záver
Práca prezentuje overenie možnosti a vhodnosti využitia experimentu Mini-EUSO a jeho vysoko citlivej UV kamery na hľadanie atmosférických gravitačných vĺn v airglow žiarení Zeme, vyvolaných vlnami cunami. Z pozorovania výsledkov simulácií vyplýva, že pre takúto detekciu by sa dali využiť aj kamery s menším rozlíšením, napríklad 16x16 pixelov, ale vhodnejšie by bolo rozšíriť zorné pole kamery, napríklad na 800x800km z terajších 250x250km. Tak by sa zvýšila šanca na zachytenie vlny. Takéto zorné pole je z nízkej obežnej dráhy Zeme pomerne veľké, preto by bolo vhodnejšie umiestniť pozorovacie satelity na vyššiu obežnú dráhu. V budúcnosti bude hľadaný optimálny model fungovania konštalácie satelitov pre rozpoznávanie gravitačných vĺn tvorených vlnami cunami. Využitie malého počtu pixelov nie je viazané len na misiu Mini-EUSO. Kamery s nízkym rozlíšením budú priestorovo aj hmotnostne nenáročné a mohli by byt využité vo väčšom množstve. Tieto malé kamery by tvorili satelity, ktoré by sa vypustili do vesmíru a plocha pokrytia by podstatne stúpla. Kedže pri jednom lete by bolo možné vypustiť hneď niekoľko malých satelitov, náklady na inštaláciu takéhoto detektoru by boli podstatne zredukované. Táto sieť satelitov by potom mohla slúžiť nielen na detegovanie atmosferických gravitačných vĺn, ale aj na iné účely.
Práca ukazuje, že Mini-EUSO experiment dokáže nad Tichým oceánom pri bezoblačnej situácii identifikovať vlnu v airglow žiarení, zodpovedajúcu cunami rovnakej kategórie ako bola cunami vyvolaná zemetrasením v Tohoku v roku 2011.
Tento článok je zhrnutím diplomovej práce vypracovanej pod vedením doc. Genčiho. Práca získala v súťaži IT SPY 2017 cenu verejnosti, ktorá je udeľovaná prostredníctvom verejného hlasovania. Diplomovú prácu s názvom Automatizácia a vývoj metód pre rozpoznávanie cunami vĺn v pozorovaniach MINI-EUSO experimentu a leták k nej, rovnako ako aj ostatné práce, je možné vidieť na stránkach súťaže.